
舵機(舵機也稱伺服電機,servomotor)已經(jīng)有很長時間的應(yīng)用了,它的體積很小,作用大,主要用于角度控制,通常使用于航模、智能小車、機器人,在工業(yè)上也有應(yīng)用,比如船舶,導(dǎo)彈姿態(tài)變換的俯仰、偏航、滾轉(zhuǎn)運動都是靠舵機相互配合完成的。舵機在許多工程上都有應(yīng)用,不僅限于船舶,在線制造,制藥等工業(yè)控制。伺服電路內(nèi)置于電機單元內(nèi),并有一個可定位的軸,通常配有一個齒輪,用電信號控制電動機,該電信號確定軸的運動量。

舵機內(nèi)部有什么?
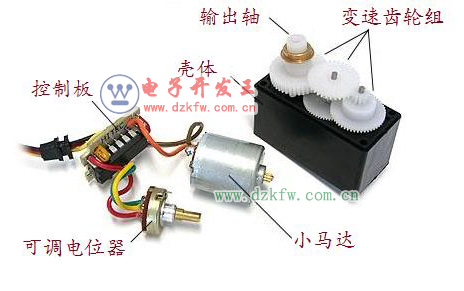
要完全了解舵機的工作原理,您需要了解一下引擎蓋。內(nèi)部有一個非常簡單的設(shè)置:小型直流電機,電位器和控制電路。電機通過齒輪連接到控制輪上。當(dāng)電機旋轉(zhuǎn)時,電位器的電阻會發(fā)生變化,因此控制電路可以精確地調(diào)節(jié)電機的運動量和方向。 當(dāng)電動機的軸是在所希望的位置時,電源供應(yīng)到電動機被停止。如果不是,則電動機以適當(dāng)?shù)姆较蜣D(zhuǎn)動。通過信號線通過電脈沖發(fā)送所需位置。電機的速度與其實際位置和所需位置之間的差值成比例。因此,如果電機接近所需位置,它將緩慢轉(zhuǎn)動,否則它將快速轉(zhuǎn)動。這稱為比例控制。這意味著電機只能在完成手頭任務(wù)時盡可能地運行,這是一個非常有效的小家伙。
如何控制舵機?

通過控制線 發(fā)送可變寬度或脈沖寬度調(diào)制(PWM)的電脈沖來控制舵機。存在最小脈沖,最大脈沖和重復(fù)率。舵機通常只能在任一方向上轉(zhuǎn)90°,共轉(zhuǎn)動180°。電機的中性位置定義為伺服在順時針或逆時針方向上具有相同的潛在旋轉(zhuǎn)量的位置。發(fā)送到電動機的PWM 確定軸的位置,并且基于通過控制線發(fā)送的脈沖的持續(xù)時間; 該轉(zhuǎn)子將轉(zhuǎn)向所需的位置。舵機希望每20毫秒(ms)看到一個脈沖,脈沖長度將決定電機轉(zhuǎn)動的距離。例如,1.5ms脈沖將使電機轉(zhuǎn)到90°位置。短于1.5ms將其沿逆時針方向移向0°位置,任何長于1.5ms的位置都會使舵機構(gòu)順時針方向朝180°位置轉(zhuǎn)動。

當(dāng)命令這些舵機移動時,它們將移動到該位置并保持該位置。如果在舵機構(gòu)保持位置時外力推壓伺服機構(gòu),舵機構(gòu)將不會移出該位置。伺服可以施加的最大力量稱為伺服的扭矩額定值。悍馬不會永遠(yuǎn)保持他們的位置; 必須重復(fù)位置脈沖以指示伺服系統(tǒng)保持在原位。
舵機的類型
舵機有兩種類型 - 交流和直流。交流伺服可以處理更高的電流浪涌,并且傾向于用于工業(yè)機械。直流伺服系統(tǒng)不適用于高電流浪涌,通常更適合小型應(yīng)用。一般而言,直流電動機比交流電動機便宜。這些伺服電機也專為連續(xù)旋轉(zhuǎn)而設(shè)計,使其成為讓機器人移動的簡便方法。它們在輸出軸上配有兩個滾珠軸承,可減少摩擦,并可輕松接觸到靜止點調(diào)節(jié)電位器。
舵機應(yīng)用

舵機應(yīng)用于無線電控制的飛機中,用于定位控制表面,如電梯,方向舵,行走機器人或操作夾具。舵機體積小,內(nèi)置控制電路,尺寸適中。在食品服務(wù)和藥品中,這些工具設(shè)計用于更惡劣的環(huán)境,由于在高壓和高溫下反復(fù)洗滌以保持嚴(yán)格的衛(wèi)生標(biāo)準(zhǔn),因此腐蝕的可能性很高。伺服系統(tǒng)也用于在線制造,其中需要高重復(fù)但精確的工作。
 返回頂部
返回頂部 刷新頁面
刷新頁面 下到頁底
下到頁底